APM 2.8 Flight Controller with Built-in Compass
Available on backorder
- Model: APM 2.8
- Input Voltage (V): 12-16 V.
- Processor: ATMEGA2560 and ATMEGA32U-2
- Dimensions (mm) LxWxH: 70 x 45 x 15
₹4,999.00 ₹5,499.00
Available on backorder
Are you want to be an Electronic Geek in the future and want to build your own drone then this Flight controller is best for you. The flight controller uses the data gathered by the sensors to calculate the desired speed for each of the four motors. The flight controller sends this desired speed to the Electronic Speed Controllers (ESC’s), which translates this desired speed into a signal that the motors can understand. This flight controller
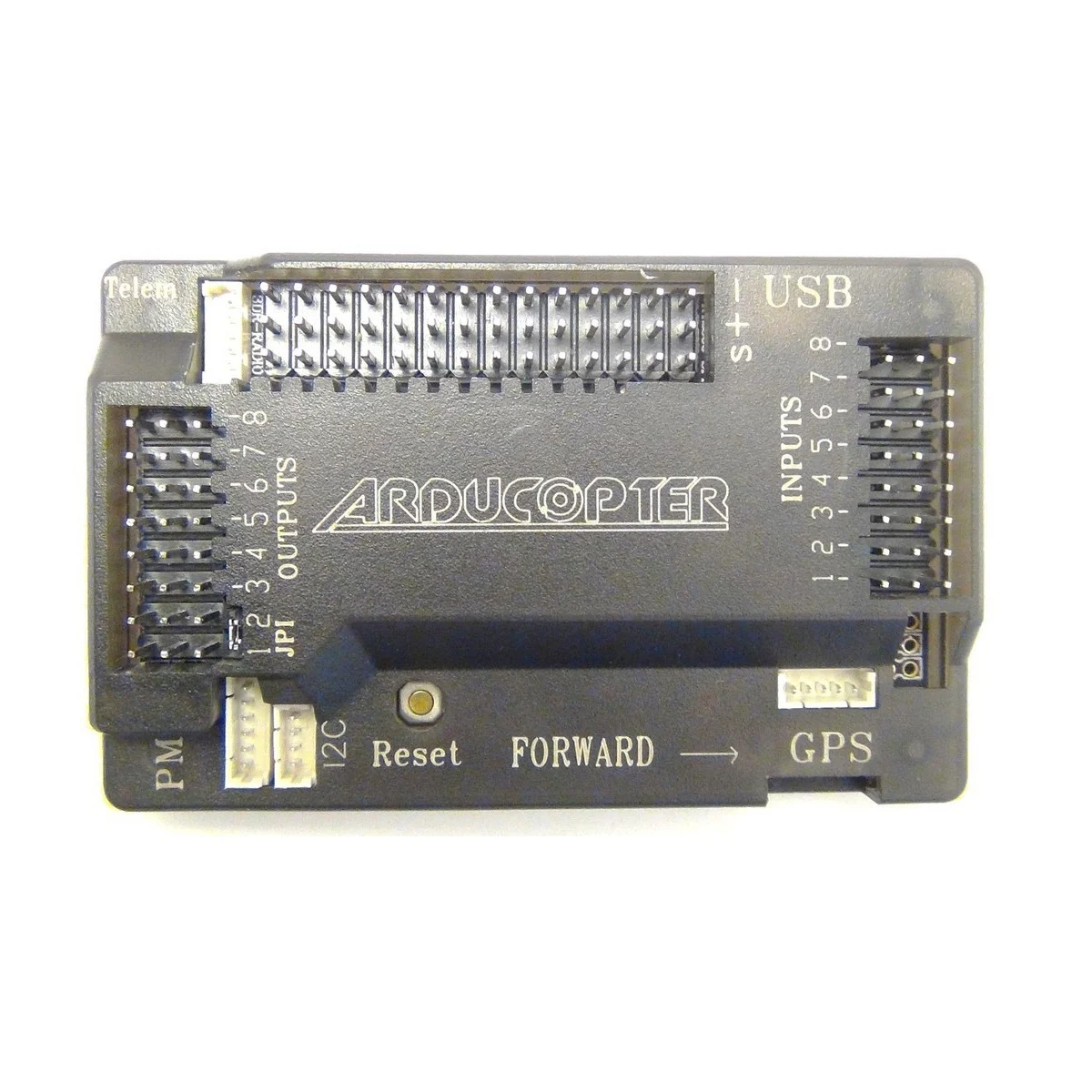
APM 2.8 Multicopter Flight Controller is an upgraded version of 2.5 and 2.6 with a Built-in Compass for FPV RC Drone. The sensors are exactly the same as the APM 2.6 flight controller. However, the module has the option to use the built-in compass an external compass via a jumper. This makes the APM 2.8 ideal for use with multi-copters and rovers.
The APM 2.8 Multicopter Flight Controller is a complete open source autopilot system. This is the best-selling technology that won the prestigious Outback Challenge UAV competition. It allows the user to turn any fixed, rotary-wing. In addition, it turns multirotor vehicles (even cars and boats) into a fully autonomous vehicle. meanwhile, it is capable of performing programmed GPS missions with waypoints.
APM Flight controller Using the built-in compass:
To use the built-in compass simply connect the jumper as shown below. The APM board will use the external compass, during the compass jumper is removed.

Powerful ground control software features:
The downloadable mission planner software is used to configure and control your APM board:
- Point-and-click waypoint entry, using Google Maps.
- Select mission commands from drop-down menus.
- Download mission logs files and analyzes them.
- Configure APM settings for your airframe.
- Interface with a PC flight simulator to create a full hardware-in-the-loop UAV simulator.
- See the output from APM’s serial terminal.
Specification:
| Power supply | LP2985-3.3. |
|---|---|
| Port | MUX (UART0, UART2, mnnI2, and OSD are optional, OSD is the defaulted output). |
| Input Voltage (V) | 12~16 VDC |
| Sensors | 3-Axis Gyrometer, Accelerometer, High-performance Barometer |
| Processor | ATMEGA2560 and ATMEGA32U-2 |
| Micro-SD Card Slot | No |
| Dimensions (mm) LxWxH | 70 x 45 x 15 |
| Weight (gm) | 82 |
| Shipping Weight | 0.085 kg |
| Shipping Dimensions | 9 × 3 × 2 cm |
Features:
- Straight Needle
- Arduino Compatible
- Onboard 4 MegaByte Dataflash chip for automatic data logging.
- Optional off-board GPS, a uBlox LEA-6H module with Compass.
- One of the first open-source autopilot systems to use Invensense’s 6 DoF Accelerometer/Gyro MPU-6000.
- Barometric pressure sensor upgraded to MS5611-01BA03, from Measurement Specialties.
- Atmel’s ATMEGA2560 and ATMEGA32U-2 chips for processing and USB functions respectively.
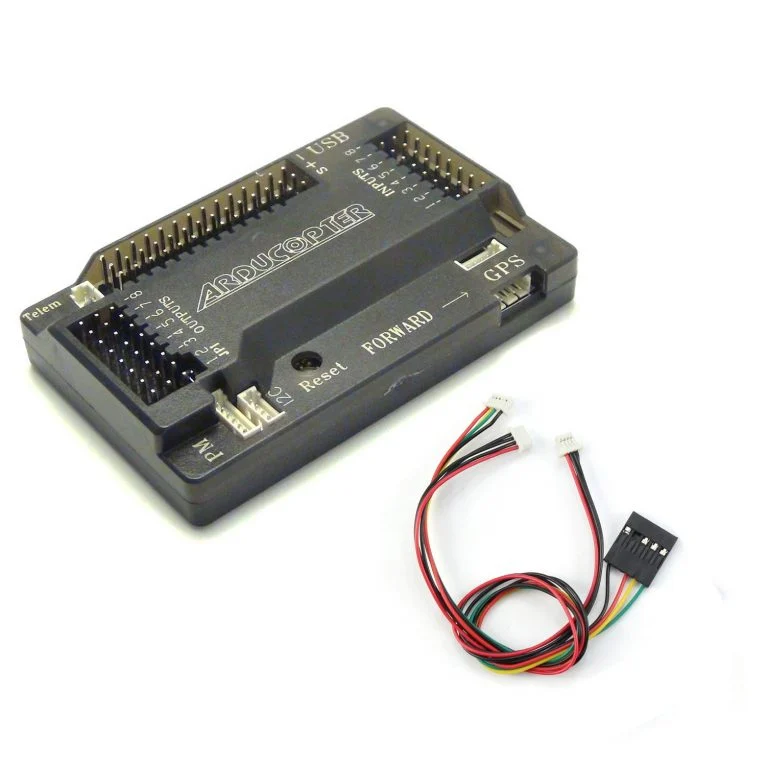
Package Includes:
1 x APM 2.8 Multicopter Flight Controller.
2 x Connecting Wires.
Based on 0 reviews
Only logged in customers who have purchased this product may leave a review.
Related products
-
Drone, Drone Frame and Accessories
F450 / Q450 Quadcopter Frame(PCB Version with Integrated PCB) + Plastic Landing Gear Combo Kit – Made in INDIA
-10% Drone, Drone Frame and Accessories
Drone, Drone Frame and AccessoriesF450 / Q450 Quadcopter Frame(PCB Version with Integrated PCB) + Plastic Landing Gear Combo Kit – Made in INDIA
- Wheelbase: 450mm
- Material: Glass Fiber + Polyamide-Nylon
- Weight: 330 gm
- Moter Mounting Hole Dia.: 3 mm
- Arm Size: 220 x 40 (LxW) mm
- Landing Gear Material: ABS
SKU: n/a -
Drone, Drone Frame and Accessories
F450 / Q450 Quadcopter Frame – PCB Version Frame Kit with Integrated PCB – Made in INDIA
-10% Drone, Drone Frame and Accessories
Drone, Drone Frame and AccessoriesF450 / Q450 Quadcopter Frame – PCB Version Frame Kit with Integrated PCB – Made in INDIA
- Wheelbase: 450mm
- Material: Glass Fiber + Polyamide-Nylon
- Moter Mounting Hole Diameter: 3 mm
- Arm Size: 220 x 40 (LxW) mm
- Arm mounting holes (on frame): 3 mm
- Arm mounting holes (on arm): 2 mm
SKU: n/a -
Drone, Drone Frame and Accessories
Ready to Sky Q450 Quadcopter Frame – PCB Version Frame Kit with Integrated PCB
-16% Drone, Drone Frame and Accessories
Drone, Drone Frame and AccessoriesReady to Sky Q450 Quadcopter Frame – PCB Version Frame Kit with Integrated PCB
- Wheelbase: 450mm
- Material: Glass Fiber + Polyamide-Nylon
- Moter Mounting Hole Diameter: 3 mm
- Arm Size: ~220 x 40 (LxW) mm
- Arm mounting holes (on frame): 3 mm
- Arm mounting holes (on arm): 2 mm
SKU: n/a












There are no reviews yet.