-
×
 Robocat 270 Racing Quadcopter Frame
1 × ₹2,299.00
Robocat 270 Racing Quadcopter Frame
1 × ₹2,299.00
Subtotal: ₹2,299.00

Available on backorder
₹3,369.00 ₹3,899.00
Available on backorder
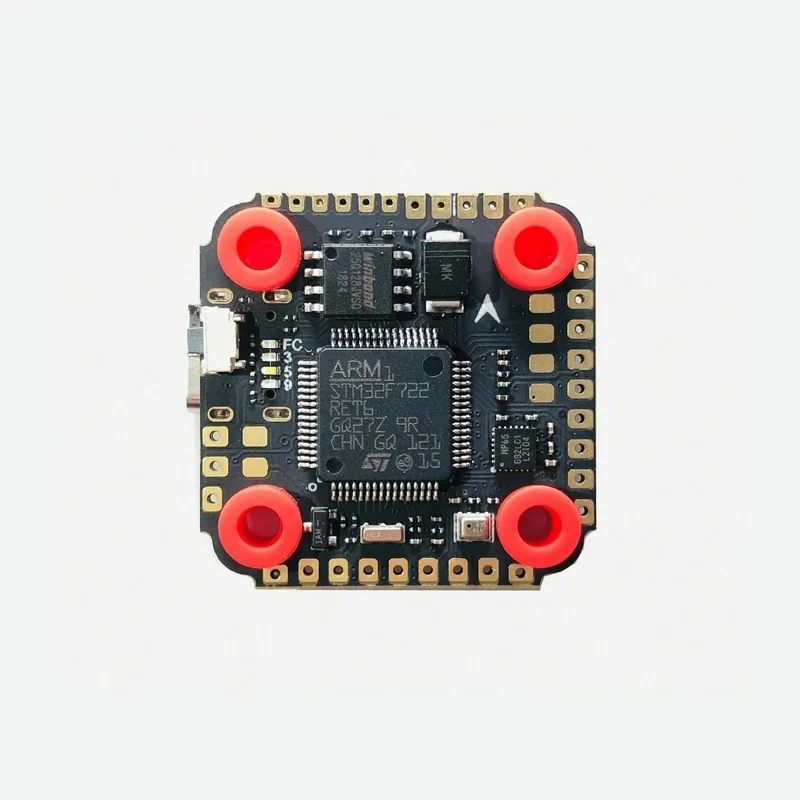
The flight controller uses the data gathered by the sensors to calculate the desired speed for each of the four motors. The flight controller sends this desired speed to the Electronic Speed Controllers (ESC’s), which translates this desired speed into a signal that the motors can understand.
The MPU6500 is the most widely used IMU sensor, and it’s used in nearly all of the greatest flight controllers. The reason for this is that it has a high vibration tolerance and can sample the gyro at 8kHz over an SPI interface.
Note: Product can vary from images in terms of Color and Design
| Model | F7 MINI V1.0 |
|---|---|
| Main Control Chip | ARM STM32F722RET6 |
| Battery input voltage | 3-6S Lipo |
| Barometer | BMP280 |
| Power Port | 1 C-Type |
| Firmware | AOCODAF722MINI |
| Weight (gm) | 6g |
| Dimensions(mm) | 3 x 3 x 1 mm |
| Shipping Weight | 0.015 kg |
| Shipping Dimensions | 13 × 11 × 2 cm |

1 x F7 MINI V1.0 Flight Controller for Huafei
Only logged in customers who have purchased this product may leave a review.














There are no reviews yet.