-
×
 X2 ELF 88MM Micro brushless racing kit
1 × ₹8,199.00
X2 ELF 88MM Micro brushless racing kit
1 × ₹8,199.00 -
×
 Robocat 270 Racing Quadcopter Frame
1 × ₹2,299.00
Robocat 270 Racing Quadcopter Frame
1 × ₹2,299.00
Subtotal: ₹10,498.00


Available on backorder
₹2,699.00 ₹2,999.00
Available on backorder
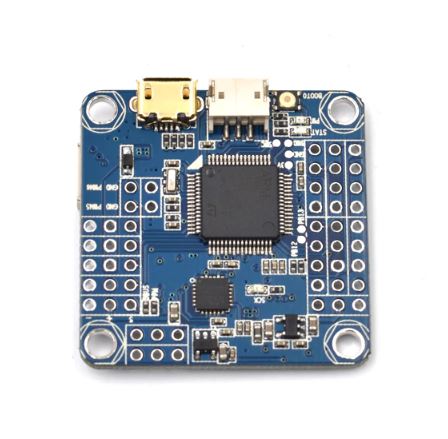
Flip32 OMNIBUS F4 Flight Controller is new generation F4 hardware flight controller for FPV race with STM32F405 MCU. The Flip32 Omnibus flight controller uses the MPU6000 over SPI for the best possible flight performance. Along with the MPU6000 are a and an AB7456 OSD chip (an upgraded MAX7456) for the beta flight integrated OSD. You won’t need a PDB with this build because there is a high-performance 5v, 1.5a STMicrocontroller L78 voltage regulator, so you can plug the flight battery right into the flight controller. The Flip32 Omnibus flight controller the first F4 Flight controller with a MAX7456 OSD chip directly connected to the flight controller, so it can be configured from the beta flight configurator. A new generation AIO Flight control for FPV. Based on the F403 MCU and uses F4 MCU controls for OSD over SPI bus in DMA mode.
The Flip 32 OmnibusF4 flight controller is an integrated flight controller and OSD specifically designed for ease of use and outstanding flight performance. The MPU6000 inertial motion sensor was chosen for its high reliability, accuracy and update speed. This board has no problem running fast loop times and ESC protocols. There is an onboard for altitude sensing along with an On Screen Display (OSD) chip directly connected to the main processor (MCU). This tight integration between the MCU and the OSD enables fast updates to the display and easy configuration of the OSD, which is managed straight from the beta flight configuration tool. You no longer need to worry about the extra hassle of configuring your OSD with a USB/UART adapter and 3rd party configuration tool, it’s all built into the flight control software.
| Model | Flip32 OMNIBUS F4 |
|---|---|
| Input Voltage (V) | 5 VDC |
| Firmware | Beta Flight 3.1.7_OMNIBUSF4SD |
| Sensors | MPU6000 SPI Bus |
| Processor | STM32F405 MCU. |
| Micro-SD Card Slot | No |
| Dimensions (mm) LxWxH | 36 x 36 x 7 |
| Weight (gm) | 5 |
| Shipping Weight | 0.01 kg |
| Shipping Dimensions | 5 × 5 × 1 cm |
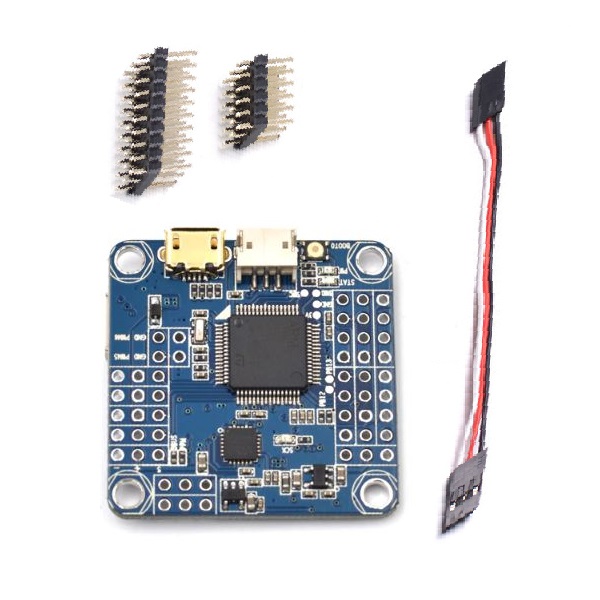
1 x Flip32 OMNIBUS F4 Flight Controller
1 x Connecting Cable
1 x 3*10 Header Pins (Straight)
1 x 2*5 Header Pins (Straight)
Only logged in customers who have purchased this product may leave a review.















There are no reviews yet.