-
×
 Robocat 270 Racing Quadcopter Frame
1 × ₹2,299.00
Robocat 270 Racing Quadcopter Frame
1 × ₹2,299.00 -
×
 NodeMcu ESP8266 V3 Lua CH340 Wifi Dev. Board
1 × ₹189.00
NodeMcu ESP8266 V3 Lua CH340 Wifi Dev. Board
1 × ₹189.00 -
×
 TS5828L 5.8G 600MW 40CH Transmitter with Antenna
1 × ₹1,819.00
TS5828L 5.8G 600MW 40CH Transmitter with Antenna
1 × ₹1,819.00 -
×
 ESP32 OLED Module for WiFi and Bluetooth
1 × ₹1,029.00
ESP32 OLED Module for WiFi and Bluetooth
1 × ₹1,029.00 -
×
 Official Raspberry Pi Keyboard, Black/Grey
1 × ₹1,499.00
Official Raspberry Pi Keyboard, Black/Grey
1 × ₹1,499.00 -
×
 Q100 Brushed Quad-copter Frame
1 × ₹329.00
Q100 Brushed Quad-copter Frame
1 × ₹329.00 -
×
 TS835 Fpv 5.8G 600Mw 48Ch (2-6S) Wireless Av Transmitter
1 × ₹1,799.00
TS835 Fpv 5.8G 600Mw 48Ch (2-6S) Wireless Av Transmitter
1 × ₹1,799.00 -
×
 Arducam Wide Angle Day-Night Vision for Raspberry Pi Camera with Acrylic Stand Case
1 × ₹4,499.00
Arducam Wide Angle Day-Night Vision for Raspberry Pi Camera with Acrylic Stand Case
1 × ₹4,499.00 -
×
 Creality -Hotend Kit Ender3 V2
1 × ₹1,469.00
Creality -Hotend Kit Ender3 V2
1 × ₹1,469.00 -
×
 RP2040 Microcontroller IC by Raspberry PI-REEL of 100
1 × ₹7,199.00
RP2040 Microcontroller IC by Raspberry PI-REEL of 100
1 × ₹7,199.00 -
×
 Ready to Sky Plastic Landing Gear for Quadcopter
1 × ₹219.00
Ready to Sky Plastic Landing Gear for Quadcopter
1 × ₹219.00 -
×
 Original Arduino Nano 33 IOT ABX00027
1 × ₹1,760.00
Original Arduino Nano 33 IOT ABX00027
1 × ₹1,760.00 -
×
 DJI Naza M Lite Multi-Rotor Flight Controller without GPS
1 × ₹7,356.00
DJI Naza M Lite Multi-Rotor Flight Controller without GPS
1 × ₹7,356.00 -
×
 Emax SimonK Series Multirotor 12A Brushless ESC (Original)
1 × ₹999.00
Emax SimonK Series Multirotor 12A Brushless ESC (Original)
1 × ₹999.00 -
×
 5.8G FPV Petals Clover Mushrooms L Antenna(RP-SMA Male Plug)
1 × ₹590.00
5.8G FPV Petals Clover Mushrooms L Antenna(RP-SMA Male Plug)
1 × ₹590.00 -
×
 Turbidity Sensor with Module
1 × ₹663.00
Turbidity Sensor with Module
1 × ₹663.00 -
×
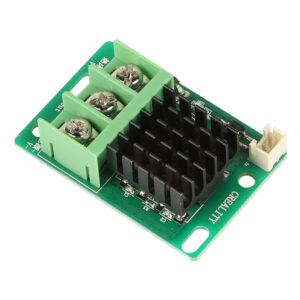 Creality Hotbed Control Module
1 × ₹899.00
Creality Hotbed Control Module
1 × ₹899.00 -
×
 Raspberry Pi 4 Model-B with 4 GB RAM
1 × ₹6,360.00
Raspberry Pi 4 Model-B with 4 GB RAM
1 × ₹6,360.00 -
×
 Pro Mini ATMEGA328P 5V/16M Blue – Standard Version
1 × ₹312.00
Pro Mini ATMEGA328P 5V/16M Blue – Standard Version
1 × ₹312.00 -
×
 ARF Quadcopter Advanced Combo Kit
1 × ₹33,340.00
ARF Quadcopter Advanced Combo Kit
1 × ₹33,340.00
Subtotal: ₹74,628.00


















There are no reviews yet.