




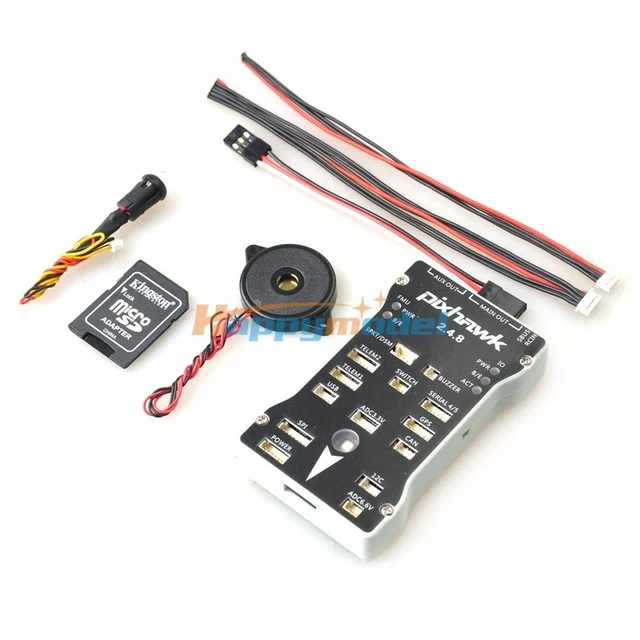
Pixhawk 2.4.8 Basic Flight Controller kit with GPS Module
Available on backorder
- 1 x Pixhawk V2.4.8 Flight board with Original Shell.
- 1 x 16GB TF card(IO firmware has written).
- 3 x Connecting Cables.
- 1 x Buzzer Module.
- 1 x Pixhawk PPM Encoder Module.
- 1x JR plug 10P input end of the cable 100mm.
- 1 x JR plug 4P output end of the cable 100mm.
- 1 x Glass Fiber Flight Controller Anti-vibration/Shock absorber Set.
- 1x NEO-M8N GPS Module with translucent Shell.
- 2 x cables (APM/PIX).
- 1 x GPS Folding Base Antenna set.
- 1 x APM 2.5.2/2.6/2.8 Pixhawk Power Module.
- 2 x 3.5dbi antennas.
- 1 x 3DR Radio Telemetry with the case(Tx and Rx).
₹14,070.00 ₹24,899.00
Available on backorder
PIXHAWK PX4 2.4.8 Flight Controller W/ SHOCK ABSORBER + UBLOX NEO-M8N GPS + GPS FOLDING ANTENNA BASE SET + Pixhawk Power Module + 433MHZ Telemetry + PPM Encoder combo Kit gives you all necessary Control component for a quadcopter, in one kit with affordable price and good quality.
Note: The Package does not include Mini OSD.
PIXHAWK PX4 2.4.8 Flight Controller is a high-performance autopilot-on-module suitable for fixed wing, multi rotors, helicopters, cars, boats and any other robotic platform that can move. It is targeted towards high-end research, amateur and industry need and combines the functionality of the PX4FMU + PX4IO.
The universal vibration damping mount or shock absorber has a list of useful applications. This is free camera mounting to Flight controller isolation. It absorbs vibration, the center supported plate is ideal for sensitive electronics and cameras. The flush flat-bottom mounting allows bolt or tape style attachment.
A new generation Ublox GPS NEO-M8N, with low power consumption and high precision, the ultimate accuracy is 0.6 meters, actually almost 0.9 meters, greater than the previous generation NEO-7N 1.4-1.6 meters accuracy; support GPS/QZSS L1 C/A, GLONASS L10F, BeiDou B1 protocol, and mode or more.
The GPS Folding Antenna Base mount comes will a laser cut adhesive pad to quickly attached your GPS module, while the mount itself can be fixed to your craft using the base plate M3 hole, or the cross slides.
The PIXHAWK PX4 2.4.8 Power Module is a simple way of providing your Pixhawk PX4 2.4.8; with clean power from a LiPo battery as well as current consumption and battery voltage measurements, all through a 6-pos cable.
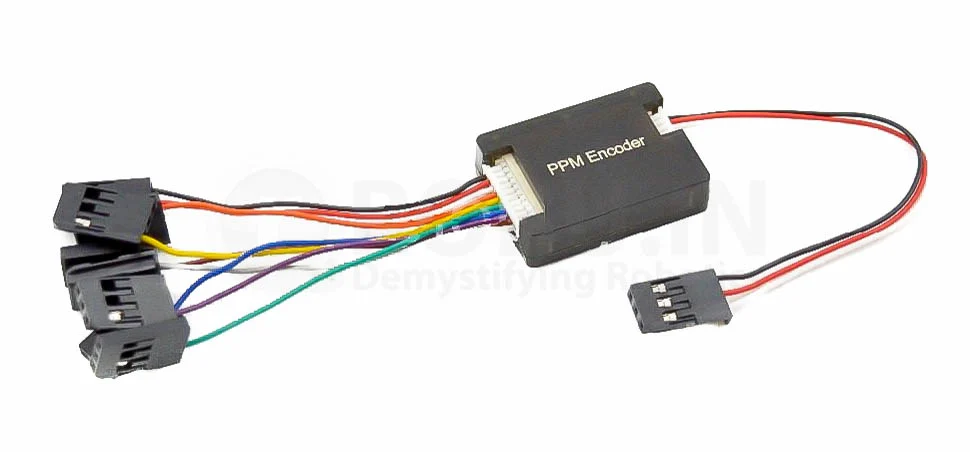
Pixhawk PPM Encoder Module can be coding a plurality of channels PWM signal that output from the receiver to PPM composite signal output, connected flight control with a single line.
Package Includes:
1 x Pixhawk V2.4.8 Flight board with Original Shell.
1 x 16GB TF card(IO firmware has written).
3 x Connecting Cables.
1 x Buzzer Module.
1 x Pixhawk PPM Encoder Module.
1x JR plug 10P input end of the cable 100mm.
1 x JR plug 4P output end of the cable 100mm.
1 x Glass Fiber Flight Controller Anti-vibration/Shock absorber Set.
1x NEO-M8N GPS Module with translucent Shell.
2 x cables (APM/PIX).
1 x GPS Folding Base Antenna set.
1 x APM 2.5.2/2.6/2.8 Pixhawk Power Module.
2 x 3.5dbi antennas.
1 x 3DR Radio Telemetry with the case(Tx and Rx).
Specifications and Features:
Pixhawk V2.4.8 Flight board:
- The advanced 32-bit ARM CortexM4 high-performance processors can run NuttX RTOS real-time operating system.
- 14 PWM / servo output.
- Bus interface (UART, I2C, SPI, CAN).
- The integrated backup power and backup controller fails, the primary controller fails over to the backup control is safe.
- Provide automatic and manual modes.
- Provide redundant power input and failover.
- Multicolor LED lights.
- Provide multi-tone buzzer Interface.
- Micro SD recording flight data.
Processor:
- 32bit STM32F427 Cortex M4 core with FPU.
- 168 MHz.
- 128 KB RAM.
- 2 MB Flash.
- 32-bit STM32F103 failsafe co-processor.
Sensors:
- ST Micro L3GD20H 16 bit gyroscope.
- ST Micro X4HBA 303H 14 bit accelerometer/magnetometer.
- Invensense MPU 6000 3-axis accelerometer/gyroscope.
- MEAS MS5607 barometer.
Interfaces:
- 5x UART (serial ports), one high-power capable, 2x with HW flow control.
- 2x CAN (one with an internal 3.3V transceiver, one on expansion connector).
- Spektrum DSM / DSM2 / DSM-X® Satellite compatible input.
- Futaba S.BUS® compatible input and output.
- PPM sum signal input.
- RSSI (PWM or voltage) input.
- I2C.
- SPI.
- 3.3 and 6.6V ADC inputs.
- Internal micro USB port and external micro USB port extension.
Glass Fiber Flight Controller Anti-vibration/Shock absorber Set:
- Color: Black
- Material: Glass fiber
- Suit for different open source flight controller, like APM 2.5/2.6/2.8, KK, MWC, and Pixhawk 2.4
- Package Weight: 24 gm.
- Upper Frame size: 90 x 60 x 2 mm(LxWxH).
- Lower Frame Size: 100 x 70 x 2 mm(LxWxH).
- Shock absorber Height: 10 x 12 mm.(DxH).
NEO-M8N GPS Module:
- Receiver type 72-channel Ublox M8 engine.
- GPS/QZSS L1 C/A, GLONASS L10F, BeiDou B1.
- SBAS L1 C/A: WAAS, EGNOS, MSAS.
- Galileo-ready E1B/C (NEO-M8N).
- Nav. update rate1 Single GNSS: up to 18 HZ.
- Concurrent GNSS: up to 10 Hz.
- Position accuracy2 2.0 m CEP.
- Acquisition2 Cold start: 26 s.
- Aided starts: 2 s.
- Reacquisition: 1.5 s.
- Sensitivity2 Tracking & Nav: –167 dBm.
- Cold start: –148 dBm.
- Hot starts: –156 dBm.
- Assistance AssistNow GNSS Online.
- Assist Now GNSS Offline (up to 35 days)3.
- Assist Now Autonomous (up to 6 days).
- OMA SUPL & 3GPP compliant
- Oscillator TCXO (NEO-M8N/Q).
- Crystal (NEO-M8M).
- RTC crystal Built-In.
- Noise figure On-chip LNA (NEO-M8M). Extra LNA for.
- lowest noise figure (NEO-M8N/Q).
- Anti-jamming Active CW detection and removal.
- Extra onboard SAW bandpass filter (NEO-M8N/Q).
- Memory ROM (NEO-M8M/Q) or Flash (NEO-M8N).
- Supported antennas Active and passive.
- Odometer Travelled distance.
- Data-logger For position, velocity, and time (NEO-M8N).
GPS Folding Base Antenna set:
- Material: CNC Aluminum alloy, carbon glass fiber rod
- Mounting rod diameter: 4mm
- length of rod: 14 cm.
- GPS plate diameter: 40 mm.
- Base plate diameter: 35 mm
- Mounting hole spacing: 16-35mm
- Weight: 20g
- Colour: Anodised black
- Note: Adhesive Pad is not included.
APM 2.5.2/2.6/2.8 Pixhawk Power Module V1.0:
- Max input voltage: 28V
- Max current sensing: 90A
- Voltage and current measurement configured for 5V ADC
- Switching regulator outputs 5.3V and 3A max
- 6-pos DF13 cable plugs directly to APM 2.5’s ‘PM’ connector
- Support 6S battery.
433MHZ Radio Telemetry:
- Very small size
- Lightweight (under 4 grams without antenna)
- Available in 433Mhz
- Receiver sensitivity to -121 dBm
- Transmit power up to 20dBm (100mW)
- Transparent serial link
- Air data rates up to 250kbps
- The range of approx 1 mile
- MAVLink protocol framing and status reporting
- Frequency hopping spread spectrum (FHSS)
- Adaptive time division multiplexing (TDM)
- Support for LBT and AFA
- Configurable duty cycle
- Built-in error correcting code (can correct up to 25% data bit errors)
- A demonstrated range of several kilometers with a small Omni antenna
- Can be used with a bi-directional amplifier for even more range
- Open source firmware
- AT commands for radio configuration
- RT commands for remote radio configuration
- Adaptive flow control when used with APM
- Based on the HopeRF HM-TRP radio module, featuring a SiLabs Si1000 RF microcontroller.
Pixhawk PPM Encoder Module:
- Support the input channels: 8.
- Output: PPM SUM × 1 / MUX × 1.
- Dimensions: 28 x 19 x 5 mm.
- Weight: 12 gm. (containing all the input and output wires).
Based on 0 reviews
Only logged in customers who have purchased this product may leave a review.















There are no reviews yet.