-
×
 Arduino UNO R4 WiFi ABX00087
1 × ₹2,899.00
Arduino UNO R4 WiFi ABX00087
1 × ₹2,899.00 -
×
 Waveshare RPi IR-CUT Camera, Better Image in Both Day and Night
1 × ₹3,289.00
Waveshare RPi IR-CUT Camera, Better Image in Both Day and Night
1 × ₹3,289.00 -
×
 Official Arduino MKR Connector Carrier (Grove Compatible) ASX00007
1 × ₹2,853.00
Official Arduino MKR Connector Carrier (Grove Compatible) ASX00007
1 × ₹2,853.00 -
×
 FS-R6B FlySky 2.4Ghz 6CH Receiver for RC FS-CT6B TH9x
1 × ₹1,090.00
FS-R6B FlySky 2.4Ghz 6CH Receiver for RC FS-CT6B TH9x
1 × ₹1,090.00 -
×
 Self-Balancing 2WD Robot Chassis
1 × ₹6,458.00
Self-Balancing 2WD Robot Chassis
1 × ₹6,458.00 -
×
 Official Arduino Portenta H7 Dual Core AI & IoT Development Board ABX00042
1 × ₹9,890.00
Official Arduino Portenta H7 Dual Core AI & IoT Development Board ABX00042
1 × ₹9,890.00 -
×
 0.3MP OV7670 Camera Module with High Quality SCCB Connector
1 × ₹271.00
0.3MP OV7670 Camera Module with High Quality SCCB Connector
1 × ₹271.00 -
×
 Aluminium Tank Track Robot Chassis for DIY Robotics
1 × ₹9,799.00
Aluminium Tank Track Robot Chassis for DIY Robotics
1 × ₹9,799.00
Subtotal: ₹36,549.00














 Connect to Jetson Orin Nano
Connect to Jetson Orin Nano Connect to Raspberry Pi 4B
Connect to Raspberry Pi 4B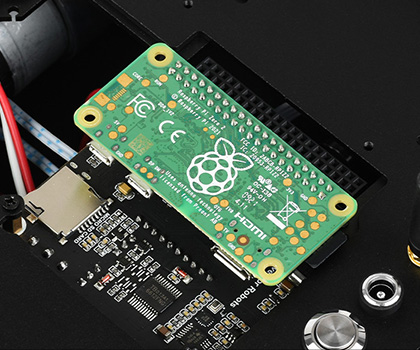 Connect to Raspberry Pi Zero
Connect to Raspberry Pi Zero














There are no reviews yet.